


Electronic navigation
Radio Detection and ranging (RADAR)
RADAR (Radio Detection And Ranging) is a device that serves to detect objects and measure their distance with radio waves. Principles of radar are based on the reflection of electromagnetic waves. Radar via aerial directs a beam wide 1-2 degrees to the horizontal plane, and to the vertical plane, it directs a beam wide 15 to 30 degrees of very short pulse modulated electromagnetic waves (EM) of the duration of less than 1 millisecond, and of high frequencies which are emitted to the horizon. These waves spread in the surrounding area, they are reflected by the obstacles and afterward they return to the radar which register them on screen as a bright spot, or as a reflection.
Radar measures the distance from an object based on the time needed for the pulses to return into the receiver. Azimuths are determined in a way that the transmittererial rotates at the slow angular velocity, and the cursor on the screen rotates at the same speed as the aerial and they are always on the same ship's heading.

We distinguish the X-band radars operating at a frequency of 9000 MHz, the wavelength of 3 cm (λ = 3 cm), which show us more detaied image and are used in small ranges. Next we have the S-band radars operating at a frequency of 3000 MHz, a wavelength of 10 cm (λ = 10 cm), which are mostly used for bigger ranges and better work in poor weather conditions.
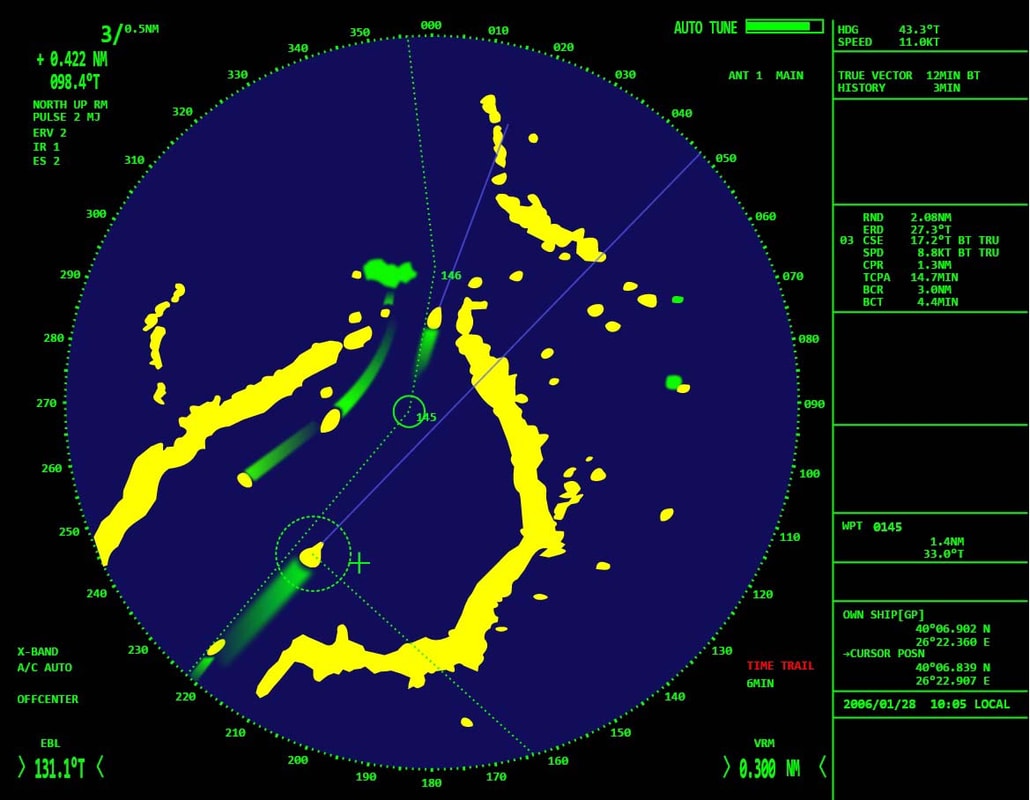
Automatic Radar Plotting Aids (ARPA)
ARPA (Automatic Radar Plotting Aids) is a radar device with a built-in computer that is used to process the data for calculations and help in performing maneuvers to avoid collisions at sea. The device allows automatic monitoring of selected vessels and constant assessment of the situation that is taking place in the shown area. Also, the device is able to warn us with visual and acoustic signals if there is a danger of collision for a certain object around the ship.
There is also the ability to perform the test maneuver simulation on all the objects around the ship. In the simulation, we determine the parameters for the course for avoiding, avoiding speed and time delay of the start of avoidance maneuver.
ECDIS and electronic chart

ECDIS (Electronic Chart Display and Information System) is a navigational information system that displays selective information from the systemic electronic map (SENC), together with positional information of locational navigational sensors, in order to enable the navigator route planning and navigation trip surveillance, as well as the display of relevant navigational parameters in navigation. Electronic navigational map contains a standardized database according to the content, structure and format developed for the use in ECDIS system.

Electronic Chart can be raster and vector maps. Raster electronic map is an electronic reproduction of the classical navigation maps. On the screen, it looks almost the same as the classical map and contains the same information. Vector maps differ significantly from raster maps.
Display of a specific area is carried out by programs that implement mathematical analysis and graphically print the outlines of coastlines and all the facilities in the area which are shown on the map. ECDIS system displays electronic navigation map on the screen and the current position of the vessel with a range of other navigational data. Some of the general features of the system are enabling simple and reliable updating of nautical maps and other information, display of the maneuvering characteristics of the vessel, the radar display on the electronic map, route planning, weather reports and a number of other possibilities. A special advantage of ECDIS electronic maps is the ability to plan the sailing and to control the flow of navigation plan directly on the screen.
Global positioning system (GPS)
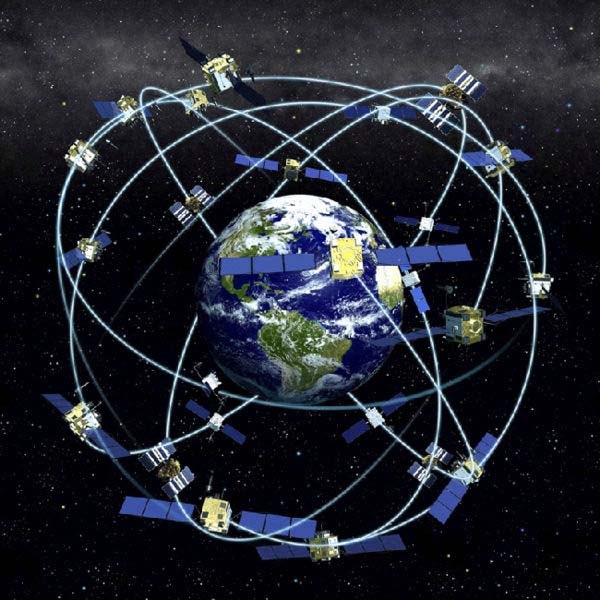
GPS (Global Positioning System) is a navigational system that works in all weather conditions around the world and lets the user determine position and other navigational parameters along three axes. The basic navigation technique for GPS consists of the use of a onefold determining the distance from the GPS satellites that broadcast their pre-calculated positions. Distance to the four visible satellites are measured independently, measuring the time delay of upcoming signals and replicated signal generated by the user. GPS signal for measuring a distance is broadcasted on two frequencies 1572.42MHz and 1227.6MHz.
Orbit configuration consists of at least 24 satellites, and 32 at most, with an inclination of 55% degree, with the height of the orbit of about 10980m. Satellites are positionally stabilized on all three axes and use solar panels as the main source of electricity. The measuring signal is sent over narrowband aerials.
4 satellites are needed for navigational purposes, whereby a satellite geometry is formed which is being automatically selected by the receiver, using the information on the ephemerides broadcasted by a satellite. Distances to 4 satellites are determined by travel time multiplied by the speed of light. The system requires precise synchronisation of the satellite clock with GPS time, which is achieved using standard frequencies in each satellite. The user's equipment must include a precise clock for measuring distances.